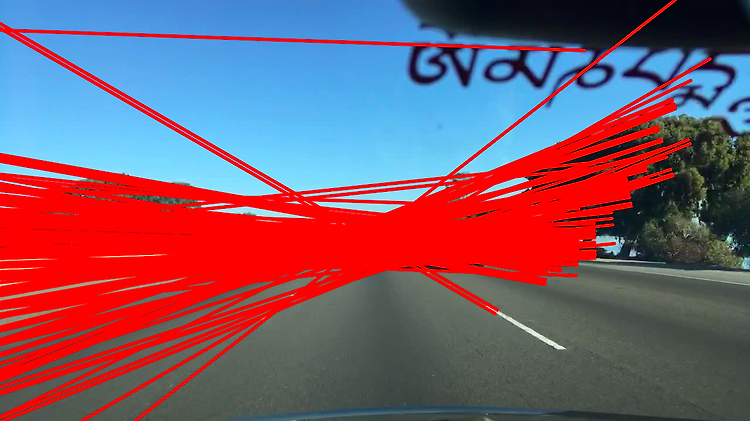
차선 검출 데이터를 시각화 📺 ⚙️ 기본 설명 ⚙️ 왜곡 제거(카메라 보정) 👍 Perspective Transform(원본 이미지 ⏩ 2D) Color Filtering(HLS, LAB color space) 픽셀 값 정규화(feat. 최댓값) 및 이미지 픽셀(HLS 1개, LAB 1개) 합치기. Window Search Show Detected Lines and Info. 개념 🧐 1~5번에서 이미지 속에 있는 차선을 찾아내기 위해 전처리 작업을 진행했습니다. 작업을 통해서 획득한 데이터를, 이미지 프레임에 얹어 주겠습니다. 사실 이 작업은 우리가 보고 있는 영상 또는 카메라 입력 데이터에 대해서 전처리된 데이터를 뿌려주는 개념으로, "이미지 전처리"라는 타이틀을 가져가야 하는 게 맞는지 고민을 했었..