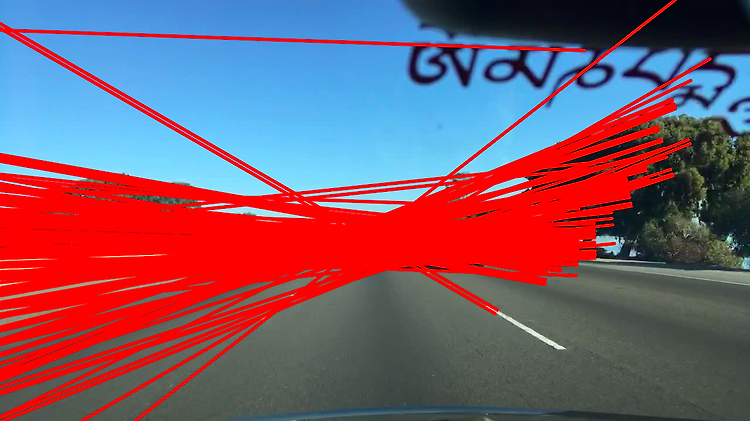
다음의 순서로 차선 검출을 구현해봤습니다. 매우 기본적인 부분을 이용했다고 생각합니다. 1. 이미지 준비 🖼 2. 이미지 가공 🛠 이진화 작업 블러 캐니엣지 3. 차선 검출 기능(사용한 함수) 🛣 ① HoughLines ② HoughLinesP 1. 이미지 준비 🖼 차선 검출 이미지는 BDD100K(Berkeley DeepDrive) 소스를 이용했습니다. 데이터 발행기관의 자세한 설명은 여기에서 확인할 수 있습니다. BDD100K 데이터는 웹사이트 회원가입만 하면 데이터를 다운 받을 수 있습니다. 제공하는 데이터 수가 말 그대로 100K(100,000개 : 10만개) 갯수이며, 각 데이터는 40초 영상으로 구성되어 있습니다. 또한, 영상에서 추출한 이미지 데이터도 제공하고 있어서, 그 데이터를 사용했습니..